
Membro VIP

Robot parallelo Incolla patch per telefoni cellulari
[Categoria generale]: applicazione funzionale [Caratteristiche del prodotto]: applicazione del robot parallelo sulle patch del telefono cellulare
Dettagli del prodotto
Mostra prodotti
Smart - Fornitore di soluzioni complete per l'automazione industriale e la produzione intelligente
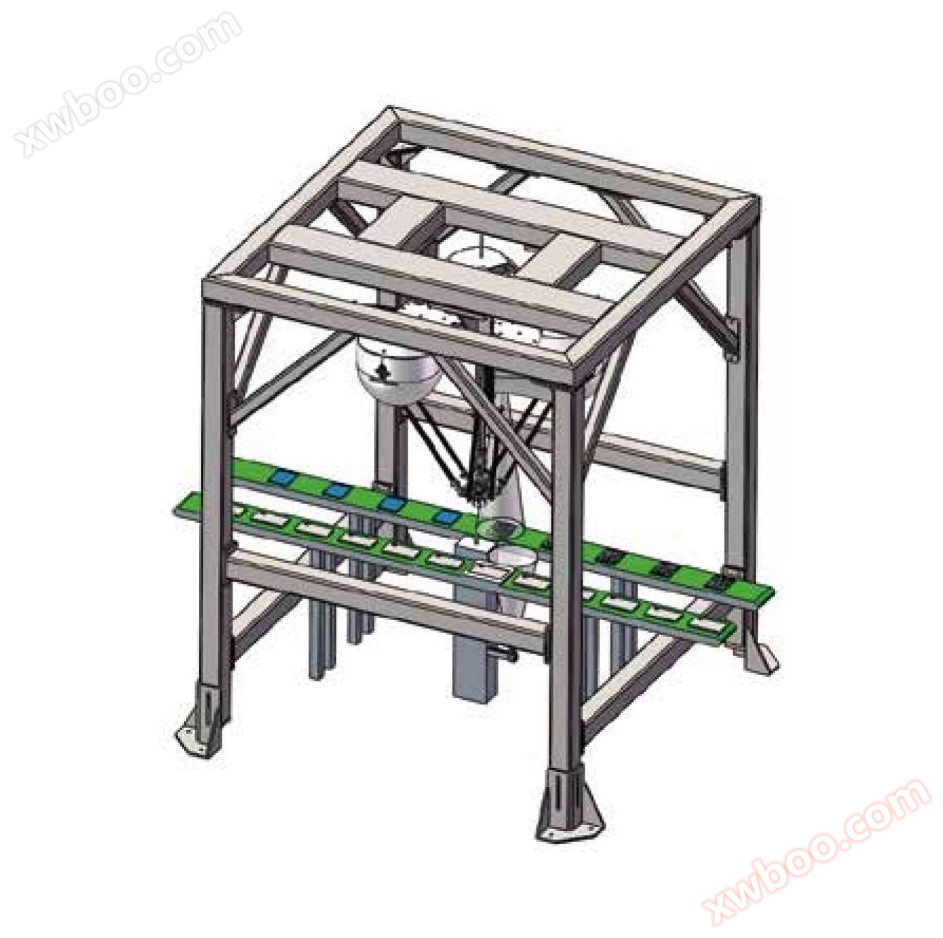

Un cliente nell'assemblaggio del telefono cellulare, ha bisogno di aggiungere una linea di produzione di robot completamente automatica, richiedendo di evitare l'esistenza di questo processo.Alto tasso di inadempienza、Ritmo di produzione lentoeIl prodotto non è abbastanza belloAspetta una serie di domande.


Nel caso, il nastro trasportatore è caricato 50 Una scatola di patch. Prima alla fotocamera. 1 Per il riconoscimento della posizione, il robot ad azionamento diretto speciale Burkent regola l'angolo in base alle informazioni, cattura con precisione il movimento della patch fino all'incollaggio della gomma e poi la fotocamera 2 Il riconoscimento secondario del contorno esterno della patch, le informazioni di posizione comunicano al robot, controllano la sua rotazione alla posizione da incollare con il telefono cellulare, per l'incollaggio preciso finale. Se la fotocamera 1 Quando la scatola è vuota, il cliente viene avvisato di cambiare.
Durante tutto il processo, il robot ha raggiunto la precisione0,01 millimetriGarantire rigorosamente la precisione finale del processo e raggiungere l'efficienza, riducendo anche l'area occupata dal campo dell'attrezzatura.

| Risultati post-attuazione | dati |
| Riduzione della forza lavoro | 0 persone |
| Crescita dell'efficienza | 33% |
| Ritmo di produzione | 60 pezzi/minuto |
| Tasso di inadempienza | 0% |
| Superficie occupata | 9㎡ |
| Periodo di ritorno degli investimenti | 2 anni |
L'applicazione è in3Celettronica、Prodotti quotidiani、Alimenti e bevandeSono ampiamente utilizzati in molteplici industrie.Nanjing Riyi Intelligent Technology Co., Ltd. può essere personalizzata in base alle esigenze dei clienti.

| Nanjing Riyi Intelligent Technology Co., Ltd. |
| Indirizzo: 28 Fengshui Road, Dongshan Industrial Center, Jiangning, Nanjing |
| Telefono: |
| Per il fax: |
| Collaborazione commerciale Contattaci | |||
|
Pulire Aggiungere WeChat
|
||

Richiesta online
-
Contatti
-
Società
-
Telefono
-
Email
-
WeChat
-
Codice di verifica
-
Contenuto del messaggio
-